open "basics";;
open "float_func" ;;
open "string_func";;
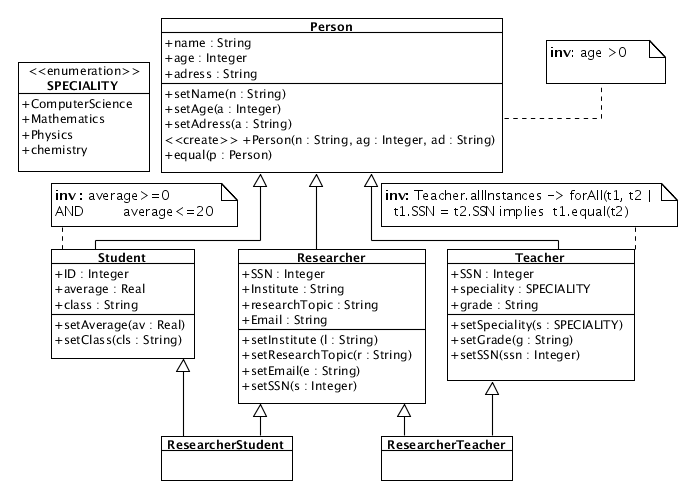
species Person =
signature name: Self -> string;
signature age: Self -> int;
signature adress: Self -> string;
signature setName : Self -> string -> Self;
signature setAge : Self -> int -> Self;
signature setAdress : Self -> string -> Self;
signature newPerson : string -> int -> string -> Self;
signature equal: Self -> Self -> bool;
(* invariant tarnsformation *)
property inv_1 : all e : Self, age(e) >=0x 0 ;
end;;
(* Transformation of enumeration SPECIALITY *)
type sPECIALITY = | ComputerScience | Mathematics | Physics | Chemistry ;;
species Researcher = inherit Person;
signature sSN: Self -> int;
signature institute: Self -> string;
signature researchTopic: Self -> string;
signature email: Self -> string;
signature setInstitute : Self -> string -> Self;
signature setResearchTopic : Self -> string -> Self;
signature setEmail : Self -> string -> Self;
signature new_Researcher :int -> string -> string -> string -> Self ;
end;;
(* species Teacher *)
species Teacher = inherit Person;
signature sSN: Self -> int;
signature speciality: Self -> sPECIALITY ;
signature grade: Self -> string;
signature setSpeciality : Self -> sPECIALITY -> Self;
signature setGrade : Self -> string -> Self;
signature new_Teacher :int -> sPECIALITY -> string -> Self ;
property inv_2 : all t1 t2: Self, equal(t1, t2) -> (sSN(t1) = sSN(t2)) ;
end;;
(* species Student *)
species Student = inherit Person;
signature iD: Self -> int;
signature average: Self -> float;
signature class: Self -> string;
signature setAverage : Self -> float -> Self;
signature setClass : Self -> string -> Self;
signature new_Student :int -> float -> string -> Self ;
property inv_3 : all e : Self, (average(e) >=f 0.0) /\ (average(e) <=f 20.0) ;
property prop_1 : all n : int, all f: float, all s : string,
(average(new_Student(n, f, s)) >=f 0.0) /\ (average(new_Student(n, f, s)) <=f 20.0) ;
property prop_2 : all e : Self, all f: float,
(average(setAverage(e, f)) >=f 0.0) /\ (average(setAverage(e, f)) <=f 20.0) ;
property prop_3 : all e : Self, all s : string,
(average(setClass(e, s)) >=f 0.0) /\ (average(setClass(e, s)) <=f 20.0) ;
(* Proof of the property inv_3 *)
proof of inv_3 =
<1>1 assume e : Self,
prove (average(e) >=f 0.0) /\ (average(e) <=f 20.0)
<2>1 prove (average(e) >=f 0.0)
by property prop_1, prop_2, prop_3
<2>2 prove (average(e) <=f 20.0)
by property prop_1, prop_2, prop_3
<2>3 qed by step <2>1, <2>2
<1>2 conclude ;
end;;
(* species ResearcherTeacher *)
species ResearcherTeacher = inherit Teacher, Researcher;
end;;
species ResearcherStudent = inherit Student, Researcher;
end;;
open "basics" ;;
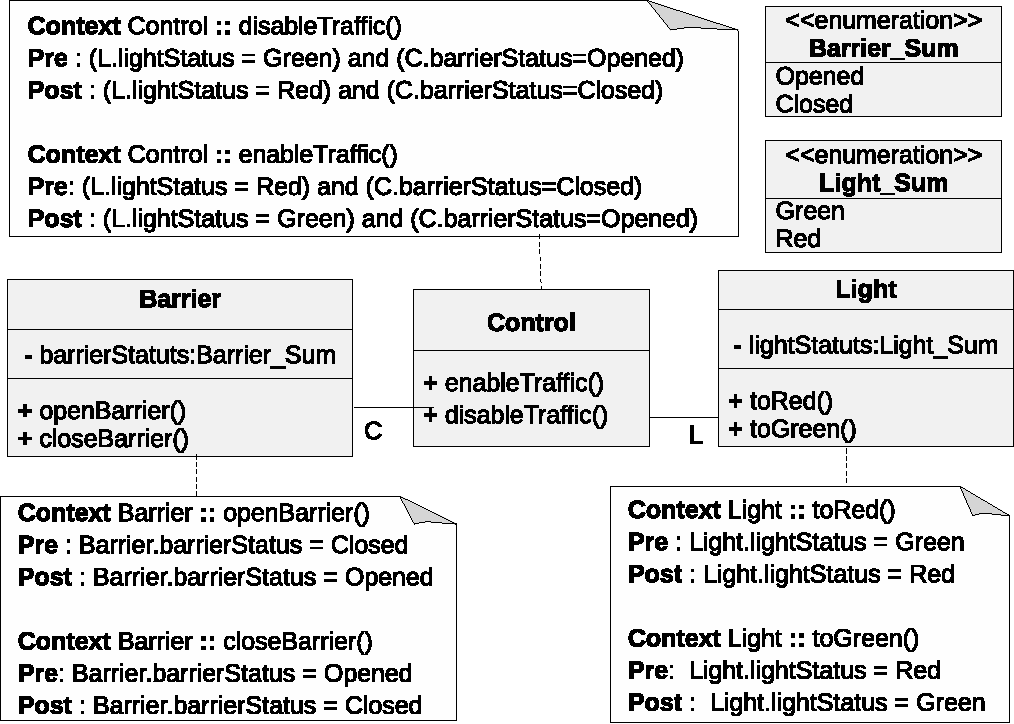
type barrier_Sum = | Opened | Closed ;;
type light_Sum = | Green | Red ;;
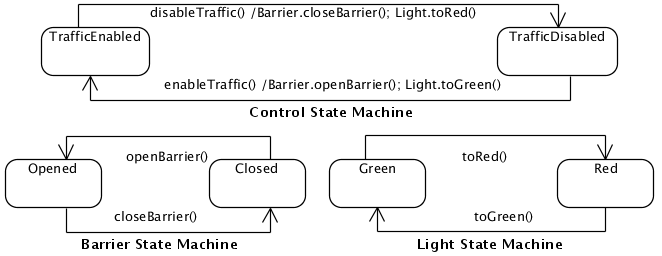
type control_Sum = | TrafficEnabled | TrafficDisabled ;;
(************************* The species Barrier transforms the class Barrier *)
species Barrier =
signature get_barrierStatus : Self -> barrier_Sum;
signature openBarrier: Self -> Self;
signature closeBarrier: Self -> Self;
signature newBarrier: barrier_Sum -> Self;
(* OCL constraints transformation *)
property prepost_openBarrier : all b : Self,
(get_barrierStatus(b)= Closed) -> (get_barrierStatus(openBarrier(b)) = Opened) ;
property prepost_closeBarrier : all b : Self,
(get_barrierStatus(b)= Opened) -> (get_barrierStatus(closeBarrier(b)) = Closed) ;
(* Transformation of the state machine of the class Barrier *)
let barrierTransitions (b:Self):Self = match (get_barrierStatus(b)) with
| Closed -> openBarrier(b)
| Opened -> closeBarrier(b);
(* Theorems deducted from the state machine of the class Barrier *)
property barrierTransition_Specification_1 : all b :Self,
(get_barrierStatus(b)= Opened) -> (get_barrierStatus(barrierTransitions(b)) = Closed) ;
property barrierTransition_Specification_2 : all b :Self,
(get_barrierStatus(b)= Closed) -> (get_barrierStatus(barrierTransitions(b)) = Opened) ;
end;;
(************************* The species Light transforms the class Light *)
species Light =
signature get_lightStatus : Self -> light_Sum;
signature toRed : Self -> Self;
signature toGreen : Self -> Self;
signature newLight: light_Sum -> Self;
(* OCL constraints transformation *)
property prepost_toGreen : all l : Self,
(get_lightStatus(l)= Red) -> (get_lightStatus(toGreen(l)) = Green);
property prepost_toRed : all l : Self,
(get_lightStatus(l)= Green) -> (get_lightStatus(toRed(l)) = Red);
(* Transformation of the state machine of the class Light *)
let lightTransitions(l:Self):Self = match (get_lightStatus(l)) with
| Green -> toRed(l)
| Red -> toGreen(l);
(* Theorems deducted from the state machine of the class Light *)
property lightTransition_Specification_1 : all l :Self,
(get_lightStatus(l)= Green) -> (get_lightStatus(lightTransitions(l)) = Red) ;
property lightTransition_Specification_2 : all l :Self,
(get_lightStatus(l)= Red) -> (get_lightStatus(lightTransitions(l)) = Green) ;
end;;
(************************* The species Control transforms the class Control *)
species Control (L is Light, B is Barrier)=
signature enableTraffic : Self -> Self;
signature disableTraffic : Self -> Self;
signature get_Control_L : Self -> light_Sum;
signature get_Control_B : Self -> barrier_Sum;
signature newBarrier: light_Sum -> barrier_Sum -> Self;
signature get_ControlStatus : Self -> control_Sum;
property prepost_disableTraffic : all c : Self,
( ((get_Control_L(c)) = Green) /\
((get_Control_B(c))= Opened) ) ->
( ((get_Control_L(disableTraffic(c)))= Red) /\
((get_Control_B(disableTraffic(c)))= Closed) ) ;
property prepost_enableTraffic : all c : Self,
( ((get_Control_L(c))= Red) /\
((get_Control_B(c))= Closed) ) ->
( (get_Control_L(enableTraffic(c)) = Green) /\
((get_Control_B(enableTraffic(c))) = Opened) );
let controlTransitions (c:Self):Self = match (get_ControlStatus(c)) with
| TrafficEnabled -> disableTraffic(c)
| TrafficDisabled -> enableTraffic(c);
property specif_controlTransitions_1 : all c :Self,
(get_ControlStatus(c)= TrafficEnabled) ->
get_ControlStatus(controlTransitions(c))= TrafficDisabled ;
property specif_controlTransitions_2 : all c :Self,
(get_ControlStatus(c)= TrafficDisabled) ->
get_ControlStatus(controlTransitions(c)) = TrafficEnabled;
end;;
(************************** IMPLEMENTATIONS *****************************
************************** *****************************
************************** *****************************)
(* *** The species ConcreteBarrier *** *)
species ConcreteBarrier = inherit Barrier;
representation = barrier_Sum;
let newBarrier (b:barrier_Sum):Self = b ;
let get_barrierStatus(b:Self):barrier_Sum = if (b = Opened) then Opened else Closed ;
let openBarrier(b:Self):Self = newBarrier(Opened) ;
let closeBarrier(b:Self):Self = newBarrier(Closed) ;
(* OCL constraints transformation *)
proof of prepost_openBarrier = by definition of newBarrier, get_barrierStatus, openBarrier type
barrier_Sum;
proof of prepost_closeBarrier = by definition of newBarrier, get_barrierStatus, closeBarrier type
barrier_Sum;
proof of barrierTransition_Specification_1 =
<1>1 assume b : Self,
hypothesis h1 : (get_barrierStatus(b) = Opened),
prove (get_barrierStatus(b)= Opened) -> (get_barrierStatus(barrierTransitions(b)) = Closed)
<2>1 prove (barrierTransitions(b)) = closeBarrier(b)
by type barrier_Sum hypothesis h1 definition of barrierTransitions
<2>2 qed by hypothesis h1 step <2>1 property prepost_closeBarrier
<1>2 conclude;
proof of barrierTransition_Specification_2 =
<1>1 assume b : Self,
hypothesis h1 : (get_barrierStatus(b) = Closed),
prove (get_barrierStatus(b)= Closed) -> (get_barrierStatus(barrierTransitions(b)) = Opened)
<2>1 prove (barrierTransitions(b)) = openBarrier(b)
by type barrier_Sum hypothesis h1 definition of barrierTransitions
<2>2 qed by hypothesis h1 step <2>1 property prepost_openBarrier
<1>2 conclude;
end;;
(* Creating a collection from ConcreteBarrier *)
collection BarrierCollection = implement ConcreteBarrier ; end;;
let bo = BarrierCollection!newBarrier(Closed);;
let bc = BarrierCollection!openBarrier(bo);;
(* *** The species ConcreteLight *** *)
species ConcreteLight = inherit Light;
representation = light_Sum;
let newLight (l:light_Sum):Self = l ;
let get_lightStatus(l:Self):light_Sum = if (l = Green) then Green else Red ;
let toRed(l:Self):Self = newLight(Red);
let toGreen(l:Self):Self = newLight(Green) ;
(* OCL constraints transformation *)
proof of prepost_toRed = by definition of newLight, get_lightStatus, toRed type
light_Sum;
proof of prepost_toGreen = by definition of newLight, get_lightStatus, toGreen type
light_Sum;
proof of lightTransition_Specification_1 =
<1>1 assume l : Self,
hypothesis h1 : (get_lightStatus(l) = Green),
prove (get_lightStatus(l)= Green) -> (get_lightStatus(lightTransitions(l)) = Red)
<2>1 prove (lightTransitions(l)) = toRed(l)
by type light_Sum hypothesis h1 definition of lightTransitions
<2>2 qed by hypothesis h1 step <2>1 property prepost_toRed
<1>2 conclude;
proof of lightTransition_Specification_2 =
<1>1 assume l : Self,
hypothesis h1 : (get_lightStatus(l) = Red),
prove (get_lightStatus(l)= Red) -> (get_lightStatus(lightTransitions(l)) = Green)
<2>1 prove (lightTransitions(l)) = toGreen(l)
by type light_Sum hypothesis h1 definition of lightTransitions
<2>2 qed by hypothesis h1 step <2>1 property prepost_toGreen
<1>2 conclude;
end ;;
(* *** The species ConcreteLight *** *)
species ConcreteControl (L is Light, B is Barrier) = inherit Control(L, B);
representation = (light_Sum * barrier_Sum);
let newControl (l:light_Sum, b:barrier_Sum):Self = (l, b) ;
let get_controlStatus(c:Self):control_Sum = match c with
| (Green, Opened) -> TrafficEnabled
| (Red, Closed) -> TrafficDisabled
| (Green, Closed) -> focalize_error ("ERROR")
| (Red, Opened) -> focalize_error ("ERROR");
let enableTraffic(c:Self):Self = newControl(Green, Opened);
let disableTraffic(c:Self):Self = newControl(Red, Closed);
let get_Control_B(c:Self):barrier_Sum = snd(c);
let get_Control_L(c:Self):light_Sum = fst(c);
(* ... *)
end ;;